
Inspection of tall buildings is a major challenge for facilities owners. The Oxford Robotics Institute, part of the Department of Engineering Science at Oxford, has developed an entirely autonomous aerial system for mapping tall buildings.
Inspection of tall buildings is a major challenge for facility owners. Accessing those sites with people typically requires complex planning and can be very dangerous.
The Oxford Robotics Institute has developed an entirely autonomous system to more safely address this issue. The system can map tall buildings (up to nine floors) while ensuring 3D map coverage.
Osprey is an autonomous aerial mapping system which showcases multiple years of research by the Dynamic Robot Systems (DRS) and Estimation, Search, and Planning (ESP) groups at ORI. At the core of the system is a DJI M600 drone carrying a custom autonomy payload developed at ORI called Frontier. Frontier combines a computer, a 3D LiDAR scanner, several HD cameras, and an IMU.
The autonomy system brings together state-of-the-art approaches for odometry, mapping, mission and motion planning. Osprey uses VILENS odometry and VILENS-SLAM to map its environment.
To ensure complete coverage, the map is passed to the SEE mission planner and AIT* for motion planning to plan routes around buildings. As battery capacity is limited, Osprey needs to relocalize between battery swaps to continue extending its map. This is achieved using an implementation of ScanContext.
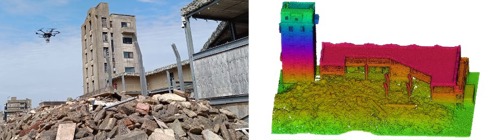
Field demonstrations with Osprey were conducted at the Fire Service College (FSC), a training centre for emergency responders about an hour from Oxford, where the system autonomously captured highly complete maps of three large industrial sites with heights up to nine floors. Detailed colour maps were created in post processing, including photorealistic renderings using SiLVR, a NeRF-based reconstruction approach.
Transformative solutions to antibiotic resistance
Bioengineering