17 Oct 2022
Undergraduate Students Run Experiments with Multiple Quadcopters
During the department’s Undergraduate Research Opportunity Scheme [EUROP], 4th-year student Jingyi and 3rd-year student Hasan worked to develop and simulate autonomous path planning algorithms for the “Capture the Flag” game using a pair of quadrotors. The simplified “Capture the Flag” game is played by two minidrones. One acts as an attacker, and the other acts as a defender. The attacker’s task is to capture the flag by entering the flag region, then return the flag to the safe return region within a given time duration to win. The defender’s task is to prevent the attacker winning by intercepting the attacker before it successfully returns the flag. The problem presents a multi-agent setting, in which agents are set to achieve conflicting objectives while subjected to certain constraints.
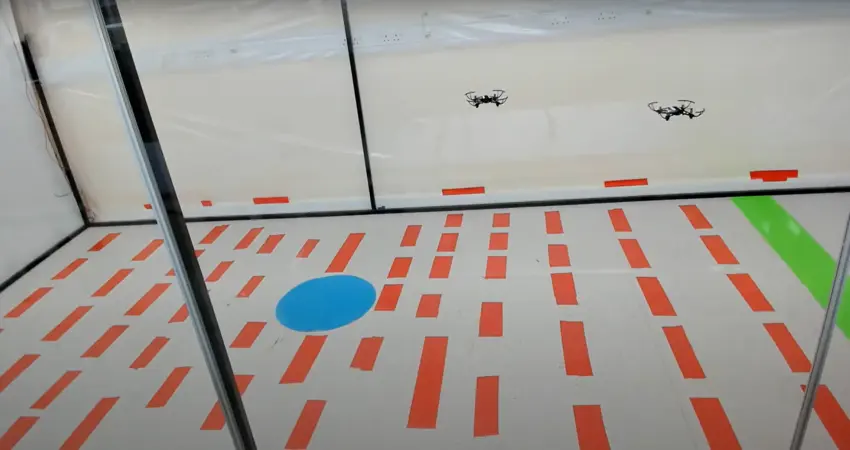
Their project, which picks up from the fourth-year project by recent graduate Keisuke Sano, finds optimal strategies for both agents using numerical solutions to the Hamilton-Jacobi reachability analysis. These strategies are saved as Lookup tables, from which every agent would be able to get their reference velocities given their current locations. The game was first simulated in a virtual environment on Simulink with two minidrones, building on from an Aerial Vehicle Hardware Support Package from MathWorks. After simulating successfully, the controller model was deployed on a pair of Parrot Minidrones platforms, and the experiment was run inside a flying cage in the ECAD lab.
A video of the defender successfully capturing the flag: https://drive.google.com/file/d/14MGCPxE3LGzkfd4W4iaLCKtR4sLL2rD1/view?usp=sharing
A video of the attacker successfully intercepting the defender: https://drive.google.com/file/d/10LyHb_A7AWBFDoWaYc7_-WqudinyzOPy/view?usp=sharing
We acknowledge the technical support by Dr. Isaac Mear from our department, by DPhil student Nikolaus Vertovec, and by Rory Adams from MathWorks. This project was supervised by Dr. Konstantinos Gatsis, Prof. Kostas Margellos, and Prof. Antonis Papachristodoulou.
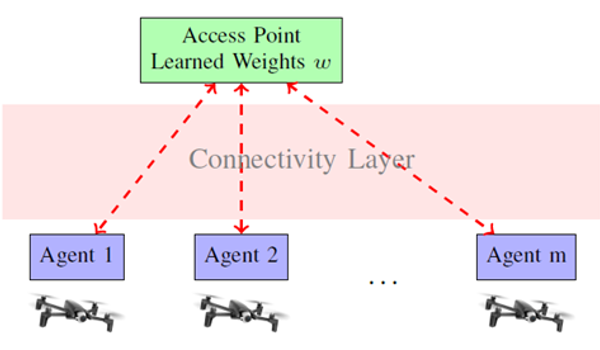
“The biggest obstacle was the fact that the Hardware package does not support controlling multiple drones simultaneously, which we were able to get around by extending the communication link between multiple machines to run the drones in parallel. This was one of the problems which required novel solutions, a great insight to real engineering research.” Explained Hasan.
“It was a great opportunity to explore extracurricular theories, work with hardware and run those exciting experiments. The drones are susceptible to disturbance, and to have stabler flying, we tried tuning the inner controller and sometimes got unexpected consequences by changing the parameters of the inner controller. Many thanks to the additional help from Isaac and Rory from Mathworks, most of the hardware problems were tackled.” Said Jingyi.