The Dynamic Robot Systems Group research and people involved
Dynamic Robot Systems Group
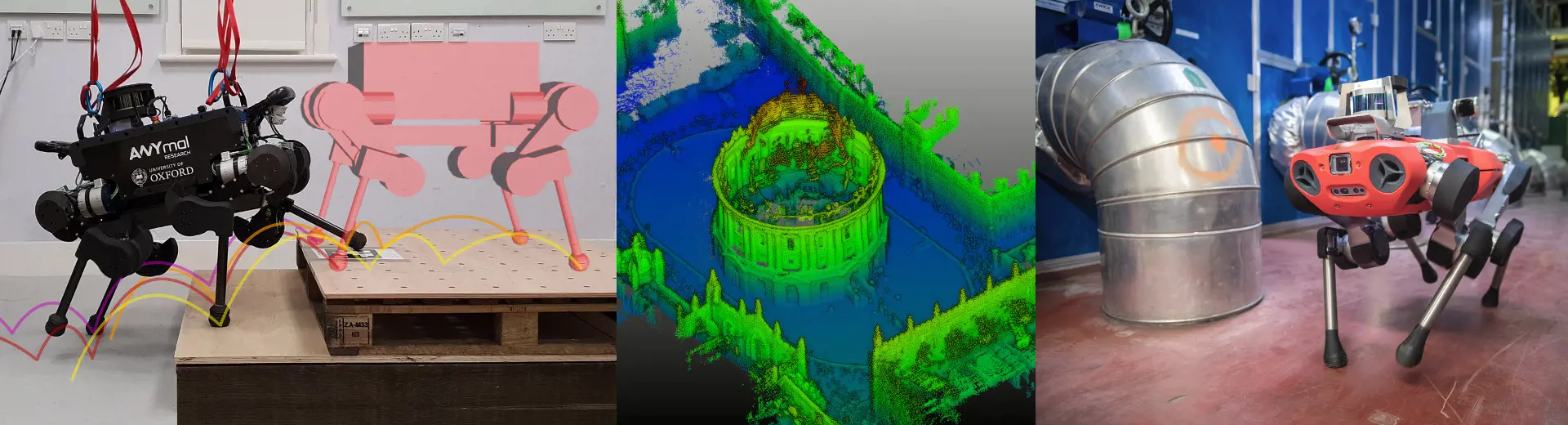
Our Research
Dynamic Robot Systems Group researches control, motion planning, mapping and navigation for dynamically moving robots. Our work has application to walking, flying and mobile robots. Dynamic walking robots place particular stress on real-time and efficient planning algorithms as well as state estimation. Our planning and control approaches typically employ optimization and a perception methods focus on multi-sensor fusion.
Robotics - Machine Learning - Computer Vision


