10 Aug 2021
Real Time Mapping of Forests with Handheld LiDAR
Researchers at the Oxford Robotics Institute are using LiDAR technology and machine learning techniques to map forests and measure growth
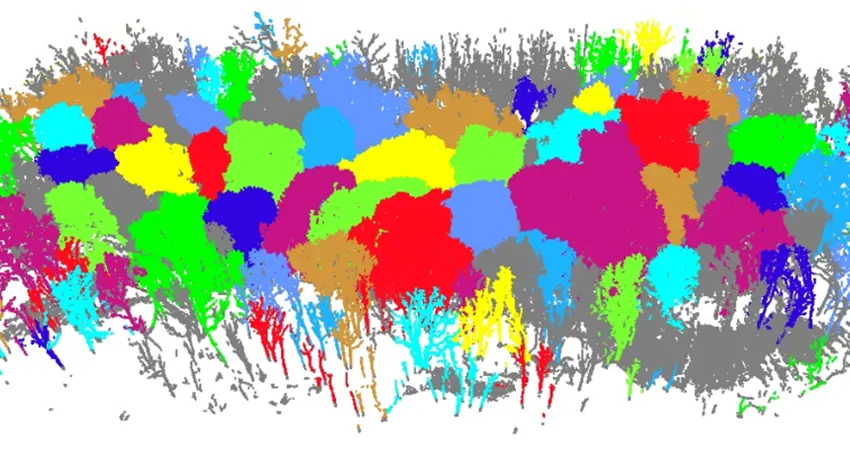
Terrestrial LiDAR scan of Wytham Woods, as seen in LiDAR360.
Have you ever wondered what guides and influences government decisions surrounding the environment, specifically logging and deforestation? Detailed models of the growth and health of forests are developed by ecology research for this purpose. In addition, it is important to monitor the growth of individual trees in real-time. Optimising the data collection process, for both speed and accuracy is key to improving these models and collecting data in a more cost effective manner.
The retrieval of quantitative metrics such as Diameter at Breast Height (DBH) is typically done manually and is very laborious – tree by tree using tape measures. Recently, more automated methods have been adopted using Light Detection And Ranging (LiDAR). Whilst accurate, this still involves a long collection time and provides no feedback while data collection is ongoing.
This year, Engineering Masters student Alex Proudman and researchers Dr. Milad Ramezani and Prof. Maurice Fallon from the Oxford Robotics Institute (ORI) have developed an online system capable of measuring the DBH of trees using a handheld LiDAR.

The handheld LiDAR system used for forestry data collection, carried around at walking speed
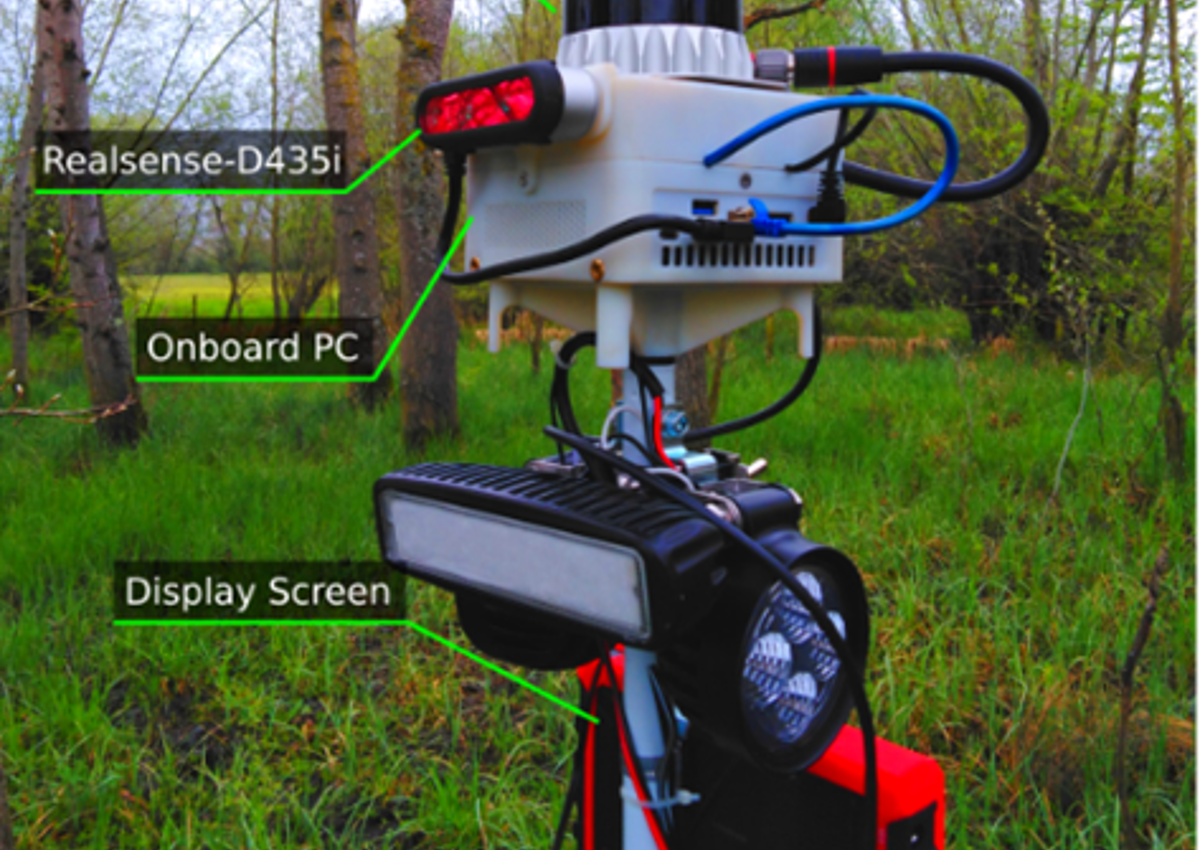
The handheld LiDAR system used for forestry data collection, carried around at walking speed
The system incorporates multiple processes to accurately map and measure the DBH of trees in real-time including:
- Accurate tracking of the motion of the device using software called VILENS developed by the Oxford Robotics Institute
- Extraction of the prevailing elevation of the environment (excluding shrubbery and trees)
- Machine learning techniques to extract individual trees and to measure their cross-sectional diameter – known as Diameter at Breast Height (DBH)
This video demonstrates the system in operation
The research involved an experimental evaluation in the University’s research forest at Wytham Woods. Traditional methods were used to determine a ground truth which allowed an assessment of our approach, concluding in the estimation of DHB to within 7cm and the successful segmentation of 90% of the trees present.
A paper describing the work will appear at the European Conference on Mobile Robots (ECMR) in September 2021.
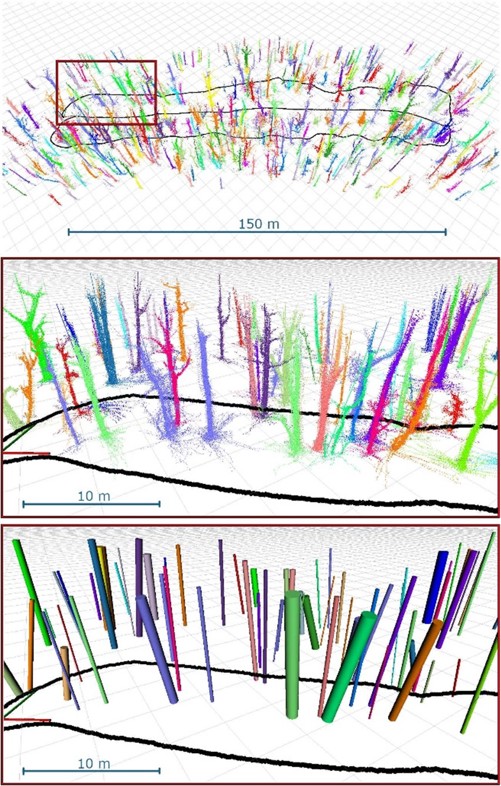
Visualisation of the system output. Top: a high level view showing a 150 m transect. The path taken by the person carrying the sensor in is shown in black. Centre and Bottom: Detail of a section is shown with two different representations: one showing each tree segmented and individually coloured and the other shows a cylinder fitted at breast height.



